
This time we will go through a tutorial on interfacing ADXL335 Accelerometer with ARM7 LPC2148 microcontroller. ADXL335 is a 3-axis acceleration sensor with analog outputs for each axis. The analog outputs are proportional to acceleration along each of the orthogonal axis. It has a minimum measurement range of ±3g where g is acceleration due to gravity at the earth’s surface (9.8m/s2). Most common applications include tilt, motion and shock sensing. The voltage supply range for ADXL335 is 1.8V to 3.6V. ADXL335 is available in 16-lead LFCSP_LQ package.
Output Voltage:
The output voltage(hence sensitivity) for each of the axis is directly proportional(ratiometric) with the supply voltage used. The Zero g bias output is also proportional to the supply voltage. The Zero g output voltage is typically Vs/2 for any given valid supply voltage.
Sensitivity:
Sensitivity is also termed as scale factor for ADXL335 sensor is given in “milli-volts(or volts) per g” i.e. mV/g(or V/g). For a given Supply Voltage Vs, the sensitivity is typically 0.1xVs V/g or Vsx100 mV/g. Hence for a Vs = 3.3V the sensitivity will be typically 330mV/g or 0.33V/g. We will use V/g as unit for sensitivity in the example shown later on.
Converting ADC result to g:
Lets start with the basic formula to convert a 10-bit ADC result into voltage for a given VREF. The sensor output can be computed as:
V
Lets, also keep units for all voltages in volts. We get the g from ADC result as follows:
Combining the above two equations, with VREF and Vs in Volts, we get,
Interfacing ADXL335 Accelerometer with ARM7 LPC2148 Example:
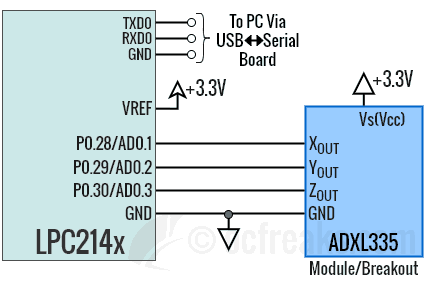
For interfacing the Accelerometer we will use the ADC block of LPC2148. Since our sensor has 3 outputs we will use AD0.1, AD0.2, AD0.3 to read the output voltages. After fetching the ADC result we can then convert it to g for each axis. In the example given below, we will use UART0 to send the data to terminal. You can refer my LPC2148 ADC Tutorial and UART Tutorial for more. The example project linked below also contains retargeted printf() for KEIL which redirects its output to UART0.
Schematic:
main.c source code:
/*(C) Umang Gajera- www.ocfreaks.com
Interfacing ADXL335 Accelerometer sensor with LPC2148 - Example Source Code for KEIL ARM.
Also see: https://www.ocfreaks.com/lpc2148-adc-programming-tutorial/
More Embedded tutorials @ www.ocfreaks.com/cat/embedded/
License: GPL.*/
#include <lpc214x.h>
#include <stdio.h> //visit https://www.ocfreaks.com/retarget-redirect-printf-scanf-uart-keil/
#include "lib_funcs.h" //OCFreaks LPC214x Tutorials Library Header
#define SEL_AD01 (1<<1) //Select AD0.1 Channel
#define SEL_AD02 (1<<2) //Select AD0.2 Channel
#define SEL_AD03 (1<<3) //Select AD0.3 Channel
#define CLKDIV (15-1) //4Mhz ADC clock (ADC_CLOCK=PCLK/CLKDIV) where "CLKDIV-1" is actually used, in our case PCLK=60mhz
#define BURST_MODE_OFF (0<<16) //1 for on and 0 for off
#define PowerUP (1<<21)
#define START_NOW ((0<<26)|(0<<25)|(1<<24)) //001 for starting the conversion immediately
#define ADC_DONE (1UL<<31)
#define VREF 3.3 //Reference Voltage at VREF pin
#define VS 3.3 //Supply Voltage for ADXL335
#define ZERO_G (VS/2) //Zero g bias
int main(void)
{
initClocks(); //Set PCLK = CCLK = 60Mhz - used by: UART, Timer and ADC
initUART0(); //Initialize UART0 for retargeted printf()
initTimer0(); //Init Timer for delay functions
PINSEL1 |= (1<<24) | (1<<26) | (1<<28); //select AD0.1/2/3 for P0.28/29/30.
int adcX,adcY,adcZ;
float resultVolts,Xg,Yg,Zg;
unsigned long ADC0CR_Setup = (CLKDIV<<8) | BURST_MODE_OFF | PowerUP;
printf("OCFreaks.com LPC214x ADXL335 Sensor Interfacing Tutorial\n");
int skipFirst = 1;
while(1)
{
AD0CR = ADC0CR_Setup | SEL_AD01 | START_NOW;//Start new Conversion on AD0.1
while( (AD0DR1 & ADC_DONE) == 0 );
adcX = (AD0DR1>>6) & 0x3FF; //get the 10bit ADC result
AD0CR = ADC0CR_Setup | SEL_AD02 | START_NOW; //Start new Conversion on AD0.2
while( (AD0DR2 & ADC_DONE) == 0 );
adcY = (AD0DR2>>6) & 0x3FF; //get the 10bit ADC result
AD0CR = ADC0CR_Setup | SEL_AD03 | START_NOW; //Start new Conversion on AD0.3
while( (AD0DR3 & ADC_DONE) == 0 );
adcZ = (AD0DR3>>6) & 0x3FF; //get the 10bit ADC result
if(skipFirst) //Ignore first ADC readings.
{
skipFirst = 0;
continue;
}
//Computing in 2 steps to keep things simple.
resultVolts = ((float)adcX * VREF) / 1024; //ADC Result converted to millivolts
Xg = (resultVolts - ZERO_G) / (VS*0.1);
resultVolts = ((float)adcY * VREF) / 1024; //ADC Result converted to millivolts
Yg = (resultVolts - ZERO_G) / (VS*0.1);
resultVolts = ((float)adcZ * VREF) / 1024; //ADC Result converted to millivolts
Zg = (resultVolts - ZERO_G) / (VS*0.1);
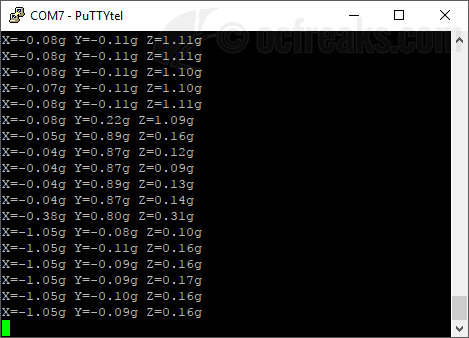
printf("X=%0.2fg Y=%0.2fg Z=%0.2fg\n", Xg,Yg,Zg);
delayMS(250); //4 Updates per second
}
//return 0; //This won't execute normally
}
Screenshot:
Project Download:
Reference(s):
{kind=link}